Here are some projects I have worked on.

Corn-hole Playing Robot
This robot was built as the project for the Applied Robotics (ROB 521) class at OSU. The objective was to build a robot that can be teleoperated to play cornhole for three throws.
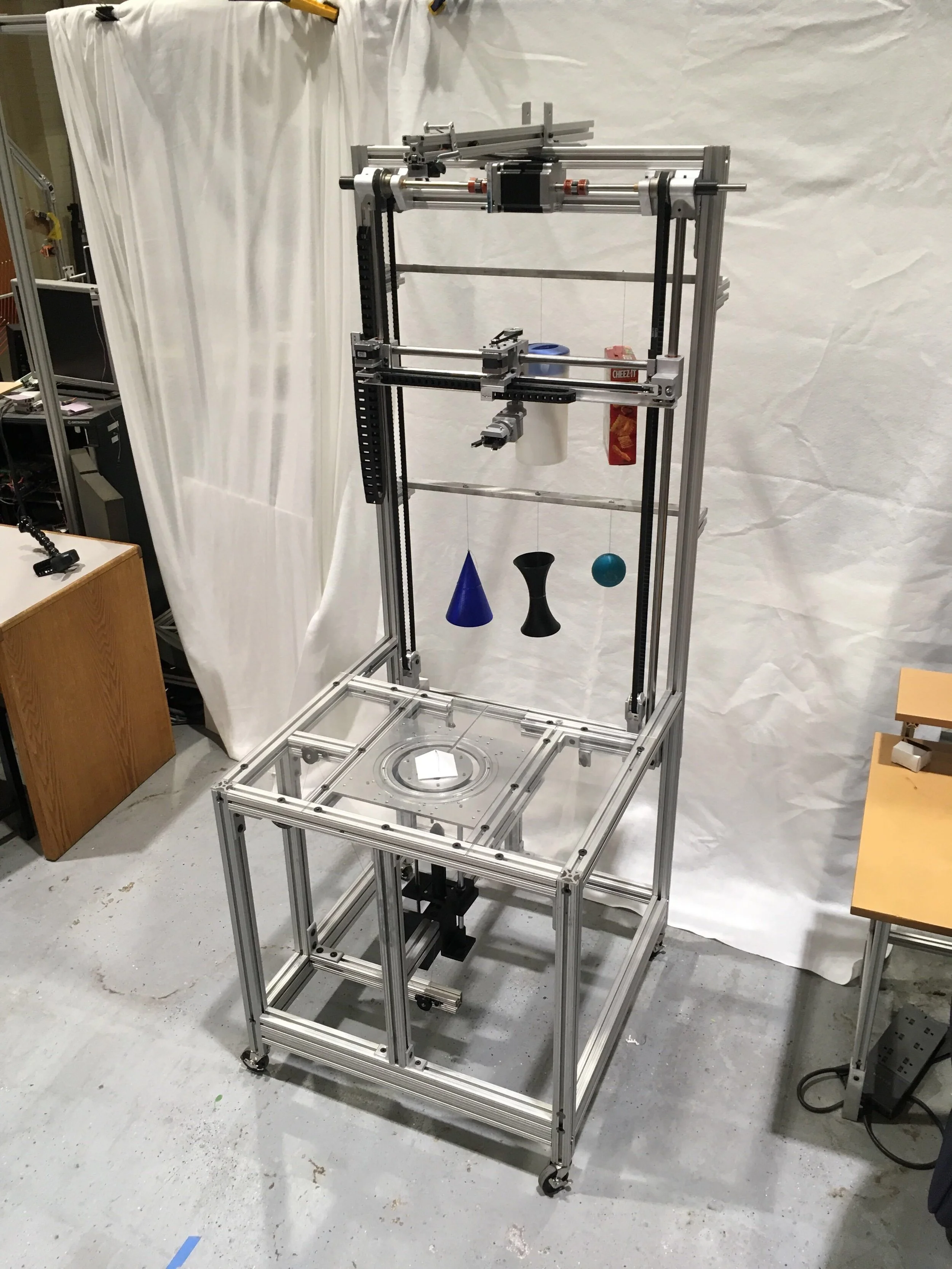
Capstone: Reset Mechanism
It involved designing and building subsystems for a testbed meant to automate robot grasping trials for robot manipulation research. My team focused on building mechanisms for resetting an object to its original position once a robot arm is done moving it around.